Non-destructive testing using full waveform inversion
The contract person for this project is Philipp Kopp (This email address is being protected from spambots. You need JavaScript enabled to view it.) and Stefan Kollmannsberger. Most of the work was done by Dr. Robert Seidl during his time at the chair. There will be a new initiative in this direction by the help of the DFG Grant No. KO 4570/1-1 and RA 624/29-1.
Non destructive testing (NDT):
Non-destructive testing addresses the following question: How can we detect flaws in mechanical compnents without destroying them? In general, the procedure for any method in NDT is the following:
1. Perform non-destructive experiments.
2. Compare to measurements on intact body.
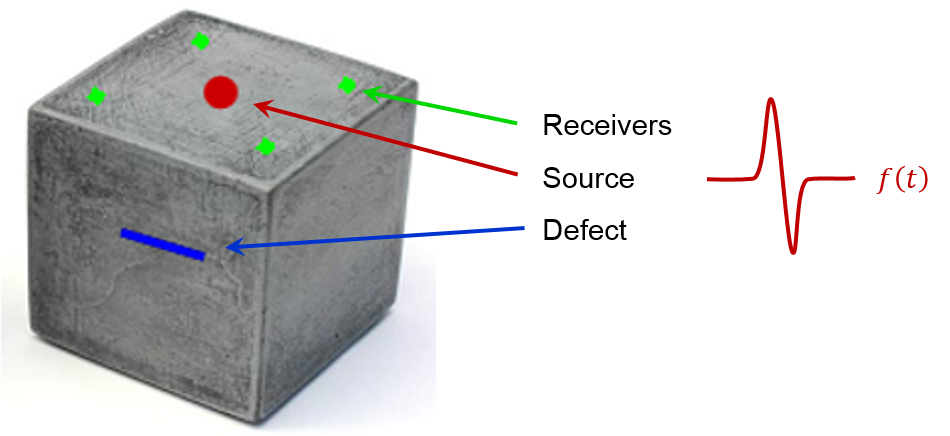
In the experiments the object is excited with an impulse and its response is measured at given receiver positions. The recorded signal is then compared to the measurements performed on an intact body. If the difference of both signals is significant, we can assume that our component is flawed. However, in practice, we might
- not have an intact component
- need geometric information about defect
- need mechanical properties of the defect.
These shortcomings are addressed by the full waveform inversion.
Full waveform inversion (FWI):
In the full waveform inversion the intact component is modelled mathematically and the mechanical resonse is simulated numerically (this is called the forward problem). We use the very simple model of an accoustic wave equation to demonstrate the concept. The goal is to tune this model such that the simulation result match the measurements of the flawed component as good as possible. In other words, we would like to find a wave speed c(x) that delivers a numerical solution u(x) that matches the measurements m(x) at the receiver positions.
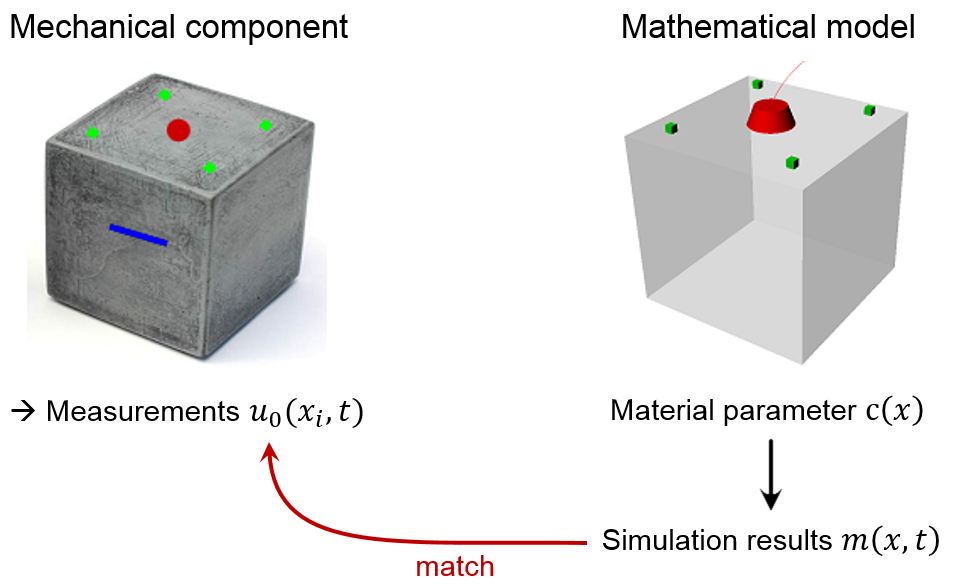
This poses an inverse problem that is formulated as follows: Find c(x) such that u(x, t) matches m(x, t) as good as possible.
From the material parameter c(x) we can deduce spatial and mechanical information about defects. This concept is valid for any model, in practice we might need to use more sophisticated mathematical models, such as linear elasticity.
The remaining piece is to specify what "matches closely" means by defining a misfit function (also called objective function) that computes the error for a given material configuration c(x). In our case we simply sum up the squares of the differences between measured and simulated signal at the receiver positions. With this step we have turned an inverse problem into a minimization problem that we can solve iteratively by, e.g., a gradient descent method.
Research:
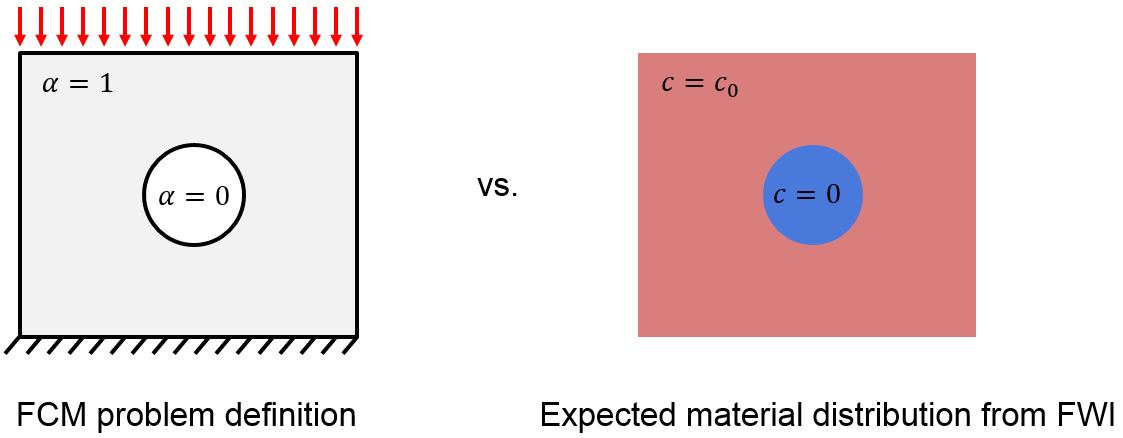
Recently, we tried to combine the full waveform inversion with the finite cell method (FCM). A straight forward combination would be to use FCM as discretization technique in the solution of the forward problem. However, another connection can be drawn by interpreting the result of the FWI, i.e. a material field incorporating the geometry of the flaw, as an FCM-like description. This is motivated as follows: To obtain an FCM description of a flawed geometry the material coefficient (e.g. a Young's modulus, or, in out case the wave speed) is multiplied by a very small value outside the pysical domain, i.e. inside a crack. The resulting material field, however, is precisely what we hope to obtain from a full waveform inversion.
Motivated by this we considered a classical plate with a hole, where the hole is now interpreted as flaw. We generate synthetic measurements using an FCM simulation of the forward problem. We then "forget" about the hole and try to reconstruct a material field c(x) from FWI, hoping that it resembles the FCM solution we started with. The setup looks as follows:
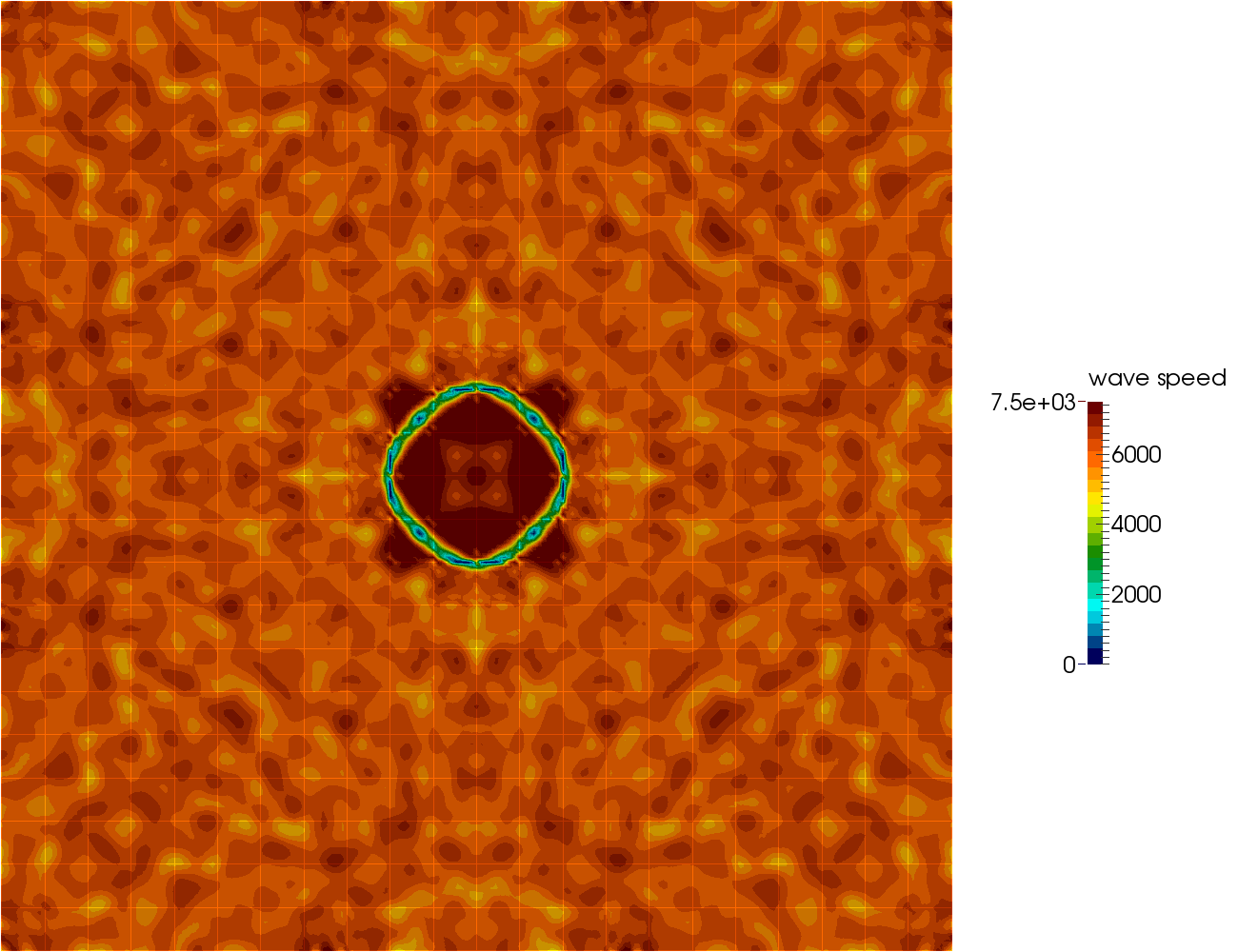
The following figure shows the generation of synthetic measurement data m(x) using FCM. The white circle represents the boundary to the fictitious disk (our flaw) in the middle.
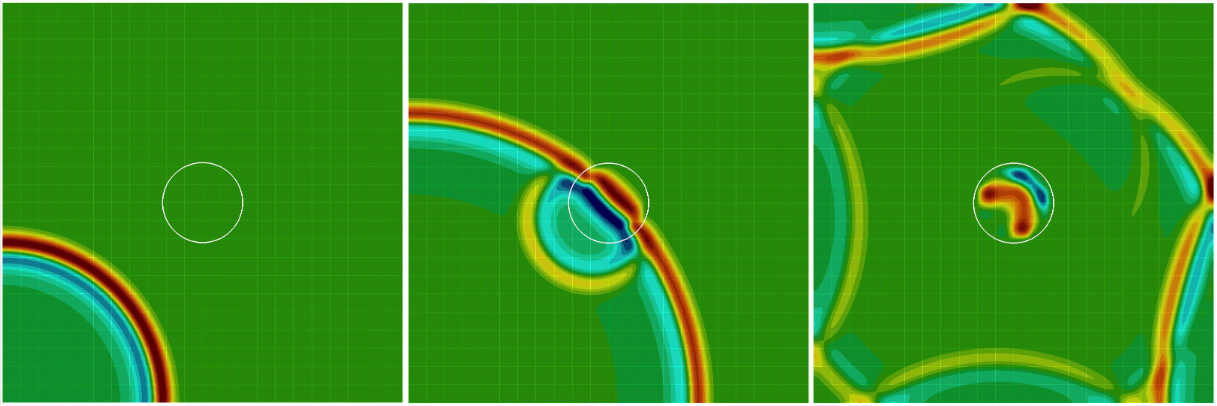
The simulation was performed on a mesh with 22 elements in each direction and a polynomial degree of 8 (using a trunk space) giving a total of 14873 degrees of freedom.
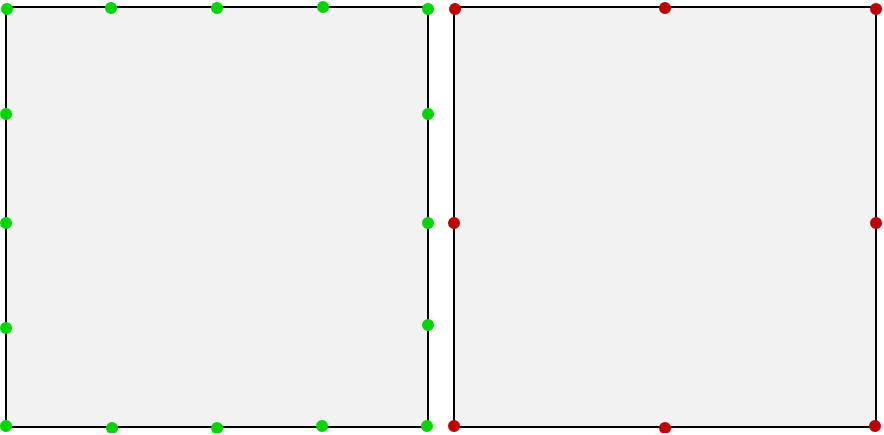
With this data we set up an inverse problem performing 8 experiments (with a difference source each experiment) and using 16 receiver locations (receivers are green, sources are red):
The mesh is the same we used to generate the measurements. The inversion using this setup reached a local minimum after 84 gradient descent iterations, giving the following material field:
The evolution of the misfit functional
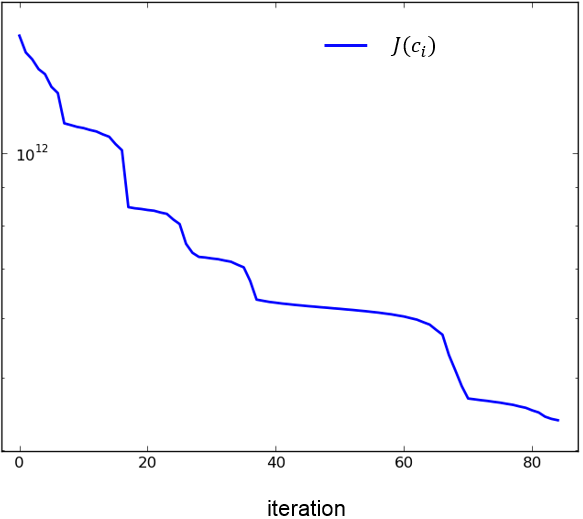
Overall the results are great, as a sharp boundary of the flaw was recovered. However, more attention has to be devoted towards the design of the objective functional, as a local minimum was reached rather quick.
Publications:
-
Seidl, R.; Rank, E.
 Full waveform inversion for ultrasonic flaw identification
Full waveform inversion for ultrasonic flaw identification
In: AIP Conference Proceedings 1806, 090013 (2017), , 2017
-
Seidl, R.; Rank, E.
Iterative time reversal based flaw identification
Computers & Mathematics with Applications 72 (4), pp. 879-892, 2016
DOI: 10.1016/j.camwa.2016.05.036